PROJECT_MODULES
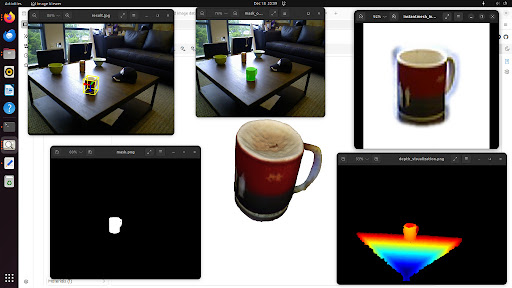
Open-Vocabulary 6D Pose Estimation
Zero-shot 6D tracking architecture with VLM-based semantic inventory. Achieved 76.5-100% ADD-S AUC on YCB-Video.
Dynamic Object Handover System
Vision-based HRI with real-time hand tracking. Robot adapts to human position for seamless object transfer.
Pedestrian-Aware AV Safety System
TTC-driven safety architecture. Fused LiDAR + RGB-D for pedestrian tracking with 90% success rate.
Humanoid Motion Planning
Implemented whole-body locomotion and motion planning for Unitree G1. Enforced ZMP control, MPC balance and RL locomotion for stable manipulation and reaching tasks.
Terrain-Aware Navigation
Developed a perception pipeline converting depth clouds to elevation maps for quadruped footstep placement.
RL Locomotion + Safety
Trained terrain-adaptive locomotion with PPO and integrated CBF as a real-time safety filter. Achieved zero-fall locomotion with 99% unsafe action rejection.
Quadruped Locomotion (RL)
Trained ANYmal quadruped policies using Proximal Policy Optimization. Achieved robust traversal on irregular terrain with 0-fall safety constraints.
VIO + Footstep Planning
Fused Visual-Inertial Odometry with footstep planning. Enabled autonomous navigation in GPS-denied environments with <10cm drift.
EMG Prosthetic Arm
Built a 5-DOF prosthetic arm controlled by EMG signals. Used XGBoost on ESP32 for real-time gesture classification with 96% accuracy.